در مطالعهای که اخیرا در مجله مهندسی اقیانوسی IEEE (انجمن مهندسان برق و الکترونیک) منتشر شد، تیمی تحقیقاتی چارچوب جدیدی را توسعه دادهاند که به رباتهای خودگردان اجازه میدهد این مناطق را با کارایی بالا و میزان خطای پایین نقشهبرداری کنند.
چالش اصلی در نقشهبرداری از محیطهای زیر آب، قطعیت نداشتن در موقعیت ربات است. به نوعی چالش بسیار بزرگ این است که متوجه شویم ربات دقیقا کجا قرارگرفته و چه میزان از میسر را پیموده است.
از آنجا که جیپیاس در زیر آب در دسترس نیست، بیشتر رباتها در زیر آب مرجع تشخیص موقعیت ندارند و دقت در راهحلهای ناوبری آنها متفاوت است. به تازگی تحقیقی با کمک الگوریتم خاصی که برای آن توسعه یافتهاست به رباتی خودمختار کمک کرد تا نقشهای بسیاردقیق از زیر آب تهیه کند.
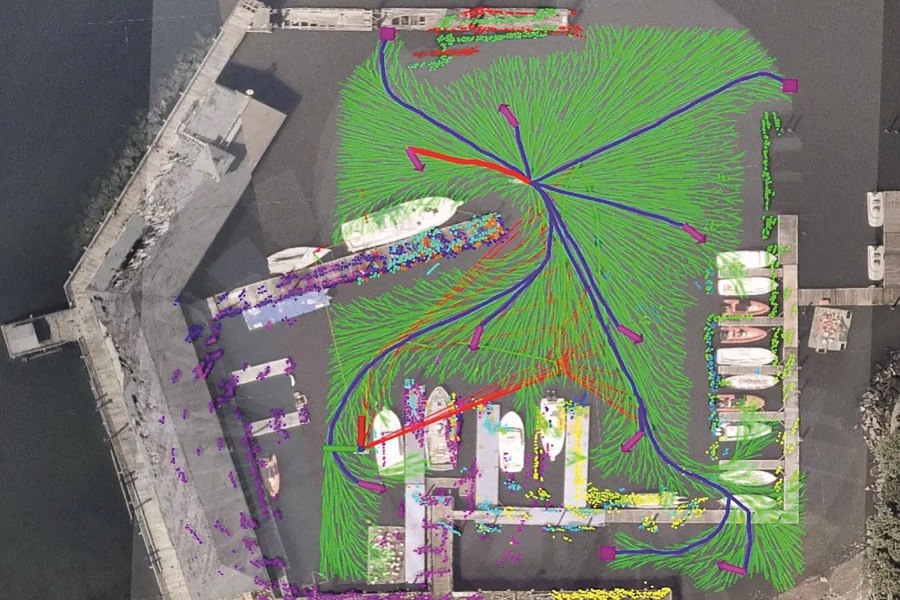
مدل ایجاد شده جدید از یک نقشه مجازی طرح میکند که به طور تقریبی منطقه اطراف را نشان میدهد. آنها الگوریتمی را توسعه دادند که مسیری را روی این نقشه مجازی به گونهای طراحی میکند که قطعیت نداشتن و مشاهدات ادراکی ربات را در نظر میگیرد و موجب خلق نقشهای دو بعدی و دقیق میشود.
مشاهدات ربات در زیر آب با استفاده از تصویربرداری با امواج سونار گردآوری میشوند که به شناسایی اشیای موجود در محیط مقابل ربات در محدوده ۳۰ متری و میدان دید ۱۲۰درجه کمک میکنند. آنها با پردازش تصاویر، از هر تصویر سونار یک ناحیه یا منطقه زیر آب را مشخص میکنند.
این تیم تحقیقاتی رویکرد خود را با استفاده از یک ربات زیرآبی با نام BlueROV ۲ در بندری در ناحیهای به نام کینگز پوینت آزمایش کردند؛ منطقهای که به گفته محققان به اندازه کافی بزرگ است که اجازه ایجاد خطاهای ناوبری قابل توجه را بدهد، در حالی که به اندازه کافی کوچک است که آزمایشهای تجربی متعددی را بدون مشکل زیاد میسر کند. این تیم مدل خود را با چندمدل موجود دیگر مقایسه کرد و هر مدل را حداقل در سه آزمایش ۳۰ دقیقهای مورد آزمون قرار داد که در آن ربات در بندر حرکت میکرد.
نتایج نشان داد هر یک از مدلهای قبلی در نقشهبرداری زیر آب مزایای منحصربهفرد خود دارند، هر چند مدل جدید نتایج بسیار جذابی را بین کاوش سریع محیطهای ناشناخته در حین ساختن نقشههای دقیق از آن محیطها به طور همزمان ارائه میکند. آنها پیشبینی میکنند این مدل برای مجموعه گستردهتری از کاربردها مانند بازرسی توربینهای دریایی، زیرساختهای آبزیپروری دریایی (از جمله مزارع ماهی) و زیرساختهای عمرانی مانند اسکلهها و پلها مفید باشد. محققان در تلاش هستند این روشها را به سناریوهای نقشهبرداری سهبعدی و همچنین موقعیتهایی که ممکن است قبلا نقشهای جزئی از منطقهای وجود داشتهباشد، گسترش دهند. این تیم میخواهد رباتها از آن نقشه استفاده مؤثری کنند، نه اینکه محبور باشند محیط را به طور کامل از ابتدا کاوش کنند. محققان میگویند اگر بتوانند چارچوب خود را با موفقیت گسترش دهند تا در سناریوهای نقشهبرداری سهبعدی از زیرآب موفق شوند، ممکن است بتوانند از آن برای کشف شبکههای غارهای زیر آب یا کشتیهای غرق شده نیز استفاده کنند.
روزنامه جام جم