ریزانگشتهای رباتیک برای لمس اشیایکوچک
اگر بخواهید نیروی واکنش پای حشره را اندازهگیری کنید، نمیتوانید بهسادگی آن را با انگشت خود فشار دهید و فشار را احساس کنید؛ تفاوت اندازه بین این دو بسیار زیاد است و همین موضوع اجازه نمیدهد با دقت کافی این کار را انجام دهید.
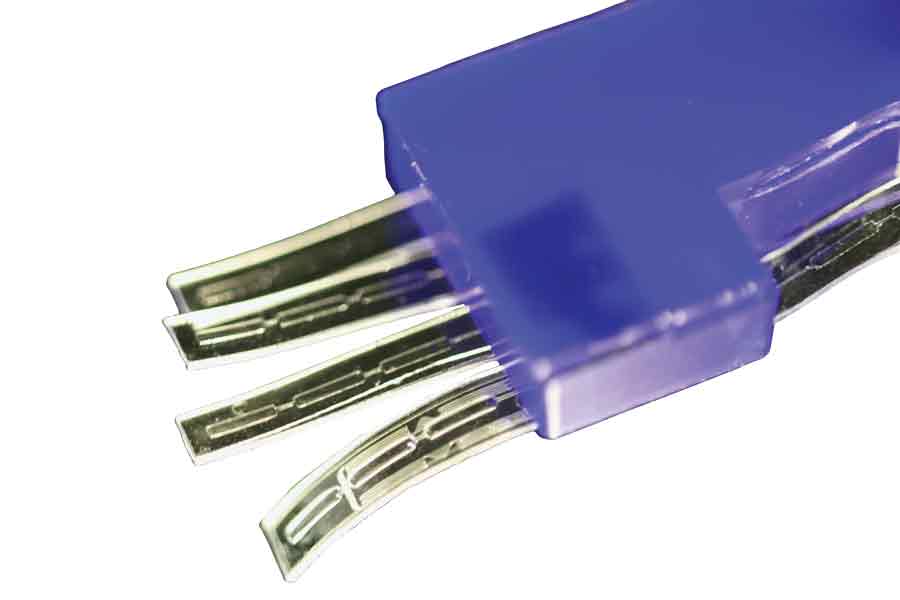
با این حال، مجموعهای از میکروانگشتهای رباتیک نرم که با دست کنترل میشوند، اکنون میتوانند این غیرممکن را ممکن کنند. هر یک از این انگشتهای مستطیلی مسطح که دانشمندان دانشگاه ریتسومیکان ژاپن موفق به ساخت آن شدهاند، تنها ۱۲ میلیمتر طول، ۳ میلیمتر عرض و ۴۹۰ میکرومتر ضخامت دارد. این انگشتها در ساختاری پنجتایی کنار هم در یک دستگاه قرار گرفتهاند تا در واقع یک دست رباتیک با انگشتان نرم و انعطافپذیر را ایجاد کنند. درون هر انگشت یک محرک پنوماتیک بالونمانند به همراه یک تنظیمکننده فشار فلز مایع وجود دارد. کاربر حسگرهای خاصی را روی انگشتان خود میبندد که سرعت، وسعت و جهت حرکات خم شدن انگشتان را اندازهگیری میکند. این دادهها در لحظه به ریزانگشت (های) مربوط منتقل و باعث میشود که براساس آن خم شوند. اگر آنها به جسمی فشار بیاورند که فشار را بر میگرداند، فشارسنجها نیرویی را که در آن جسم این کار را انجام میدهد اندازهگیری میکنند.
در آزمایشی برای بررسی این فناوری، از ریزانگشتها برای اندازهگیری نیروی واکنش پاهای یک حشره زنده که با یک ابزار مکنده به صورت وارونه نگه داشته میشد، استفاده شد. نیروی اندازهگیری شده حدود ۱۰ میلی نیوتن بود که مطابق با تخمینهای محاسبه شده قبلی بود. اکنون امید است که پس از توسعه بیشتر، این فناوری نهتنها در مطالعات حشرات، بلکه در کاربردهای دیگری که به استفاده از «دست بسیار ظریف» نیاز است هم مورد استفاده قرار گیرد. پروفسور ساتوشی کونیشی، پژوهشگر ارشد این مطالعه که نتایج آن در نشریه معتبر علمی ساینتیفیک ریپورتز منتشر شده است، میگوید: «ما با میکروانگشت حسگر فشار خود، توانستیم مستقیما حرکت و نیروی هل دادن پاها و تنه یک حشره را اندازهگیری کنیم؛ چیزی که قبلا دستیابی به آن غیرممکن بود. ما پیشبینی میکنیم که نتایج ما منجر به توسعه فناوری بیشتر برای تعاملات ریزانگشت و حشره شود که منجر به تعامل انسان و محیط در مقیاسهای بسیار کوچکتر شود.»
روزنامه جام جم

تازه ها
پیشنهاد سردبیر

گواردیولا چگونه برترین مربی تاریخ شد؟
واقعیتهای تلخ «پپ»



خرید و فروش غیرقانونی انواع حیوانات و پرندگان کمیاب ادامه دارد